{kind=link}
{kind=link}
File:Cyclope robot.jpg
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
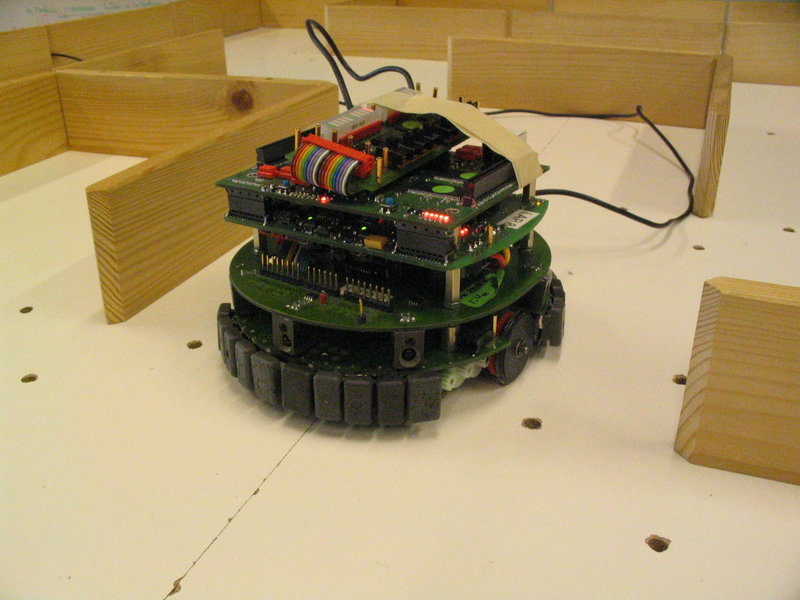
Blind "Cyclope" in a maze at EPFL / Switzerland. Moving with Braitenberg-style activation rules and a small FSM.
The Cyclope is a low cost didactic robot, with a nice set of sensors for doing students labs on assembly language and sensor drivers.
The version on the picture is an enhanced Cycloped based on the "RokEPXA" card developped at EPFL. The FPGA is an Altera EPXA1. RokEPXA is a minimal board using A-BUS compatible power-supply. RokEPXA replaces old main boards RokHC12 and Rok68 of the robot Cyclope and opens a new era. Altera EPXA integreted circuit contains an "hardcore" ARM922T processor system and a FPGA. This board can not only be used with the robot Cyclope but in many others applications. Now, it's possible to build a multi-processor system using Altera NIOS "softcore" processor system in FPGA, for example.
More info here : http://lapwww.epfl.ch/dev/arm/index.php?presentation
Picture taken by Dake
| Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2 or any later version published by the Free Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. Subject to disclaimers. |
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 00:48, November 28, 2005 | | 2,048 × 1,536 (983 KB) | FrJohn (talk | contribs) | Blind "Cyclope" in a maze at EPFL / Switzerland. Moving with Braitenberg-style activation rules and a small FSM. The Cyclope is a low cost didactic robot, with a nice set of sensors for doing students labs on assembly language and sensor drivers. The ve |
- You cannot overwrite this file.
File usage
The following file is a duplicate of this file (more details):
{kind=link}
- File:Cyclope robot.jpg from a shared repository
{kind=link}
The following 2 pages link to this file:
{kind=link}